【CAA新闻】“面向复杂水域作业的自主无人艇集群协同关键技术与核心装备” 通过科技成果鉴定
7月23日,由广东华中科技大学工业技术研究院(简称“工研院”)牵头完成,华中科技大学、中科院南海所、广船国际、中船701所、中国船舶工业综合技术经济研究院、香港城市大学等单位共同完成的“面向复杂水域作业的自主无人艇集群协同关键技术与核心装备”通过了中国自动化学会的科技成果鉴定。

本次鉴定会由中国自动化学会组织并主持召开,以线上视频+线下会议形式进行。鉴定委员会由中国工程院院士、国家水运安全工程技术研究中心主任严新平担任主任委员,中国工程院院士、聚合物新型成型装备国家工程研究中心主任瞿金平担任副主任委员,鉴定会成员包括中国自动化学会副理事长王成红教授、广州机械科学研究院陈雪梅教授、广东工业大学陈新教授、广东省智能制造研究所程韬波研究员、哈尔滨工业大学(深圳)楼云江教授、暨南大学柳宁教授、中山大学成慧教授等高校、院所相关领域的权威专家。

航母“辽宁舰”总设计师朱英富院士,华中科技大学自动化学院党委书记张耀、院长曾志刚教授,无人艇团队带头人王钧教授等通过视频线上参加了鉴定会。

广东省科学技术厅副厅长杨军,东莞市科学技术局副局长黄天梁等省市领导,以及项目完成单位相关负责人、核心研发人员代表出席了会议。会议由中国自动化学会秘书长张楠主持。


▲成果牵头完成单位广东华中科技大学工业技术研究院院长张国军致欢迎词

鉴定委员会听取了成果牵头完成单位所作的《项目技术研究报告及工作总结报告》、《科技查新报告》等,认真审查了提交鉴定的文件材料,考察了东莞松山湖自主无人艇基地的集群实验现场,经过对成果内容的质询、汇报人答疑及讨论等环节,鉴定委员会一致认为,自主无人艇集群协同控制的基础理论研究处于国际先进水平,自主无人艇集群队形相变调控技术处于国际领先水平。同意通过科技成果鉴定。

▲专家考察项目现场

▲专家考察东莞松山湖自主无人艇基地
针对复杂水域环境动态作业需求,该项目首创了无人艇集群队形相变调控的理论与方法,建立了无人艇集群双层组网协同控制构架,发明了异构无人艇集群队形协同相变调控等核心部件,实现了动态任务驱动的集群队形演化调控;提出了无人艇高精度控制与失稳恢复策略相结合的方法,开发了一种矢量喷水推进器、全电气推进控制系统等核心功能部件,实现了无人艇高精度稳定的航速、航向、航迹和定位控制;发明了多艇多源传感器融合感知检测与目标识别跟踪系统,实现了复杂水域环境的目标准确识别;项目研制了由 3 类 10 艘无人艇组成的异构集群成套装备。
项目申请发明专利 46 件,授权发明专利 24 件,软件著作权 11 项;开发新产品 4 个,牵头制定国家标准 3 项,企业标准 4 项;发表 SCI 论文 45 篇,其中 JCR 一区论文 42 篇。
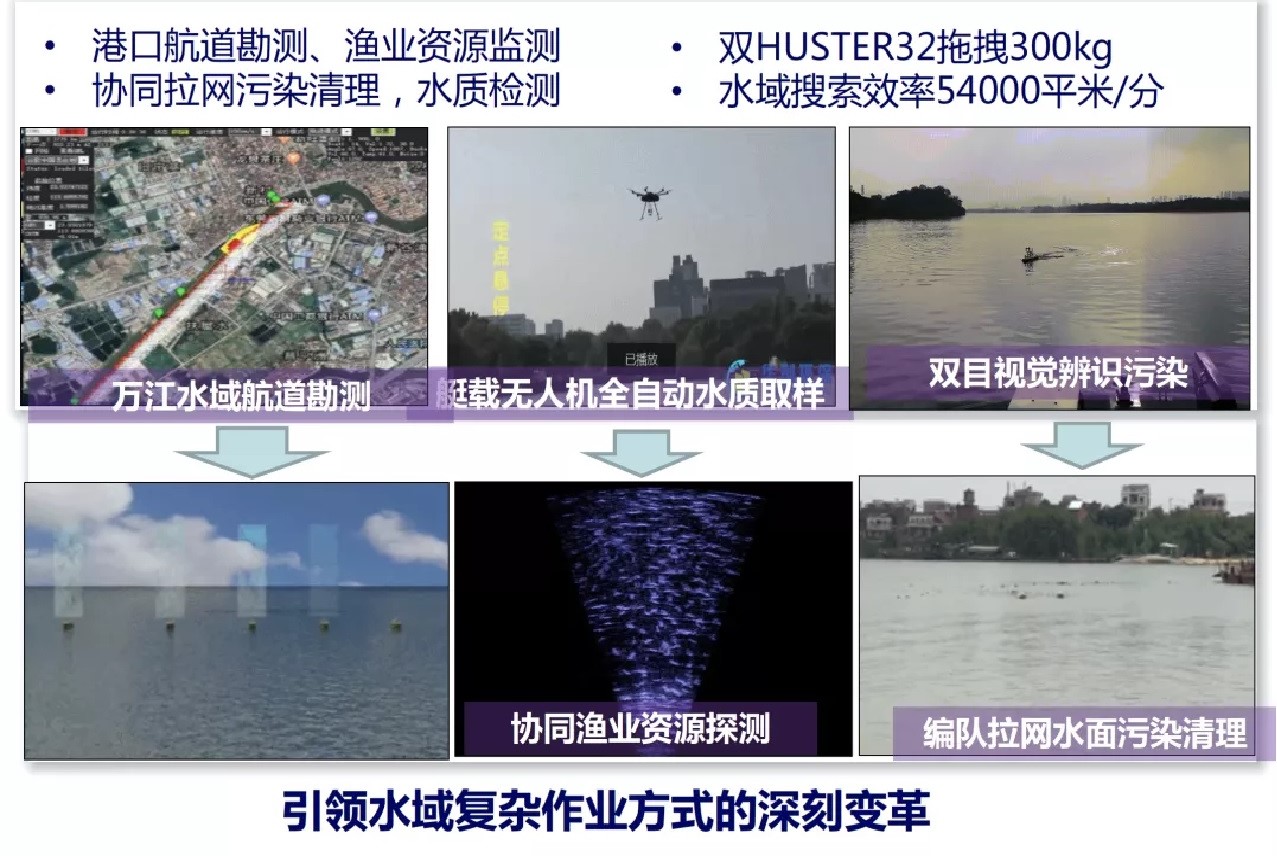
成果已在深中通道跨海沉管隧道等重大海洋设施检测、珠江口部分港口航道检测、东江、万江等内河水质检测与水面污染清理、渔业资源探测等领域获得应用;并成功应用于国内知名企业、院校和研究院,成为其核心配置与重要任务载荷,在复杂水域建设中发挥了重要作用,取得了显著的经济效益和重大的社会效益。

来源:广东华中科技大学工业技术研究院
中国自动化学会 2020.7.28