无人艇集群协同又出成果,热烈祝贺胡斌斌博士、刘彬博士后和孟浩飞老师的论文“Distributed Surrounding Control of Multiple Unmanned Surface Vessels with Varying Interconnection Topologies”被国际控制应用顶刊IEEE Transactions on Control Systems Technology录用
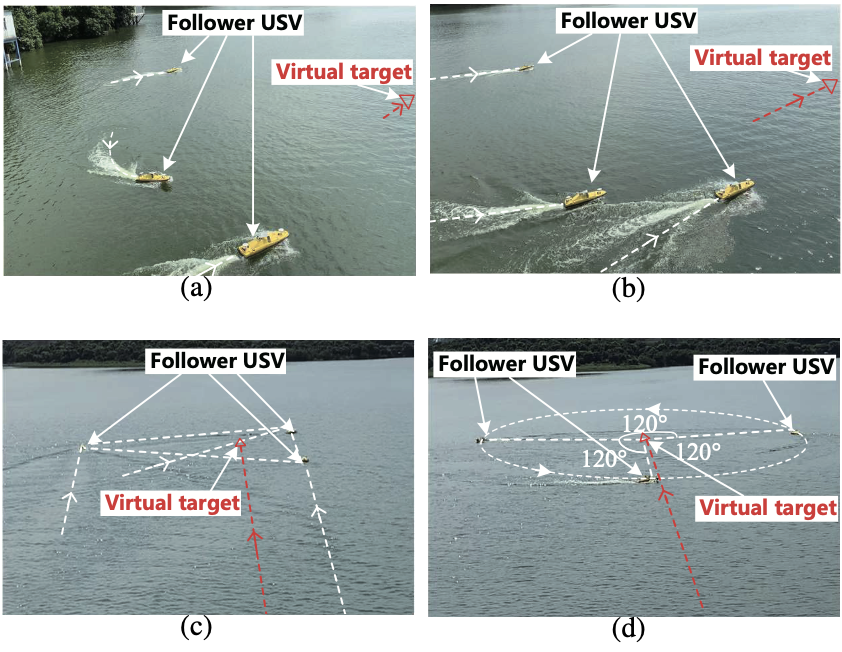
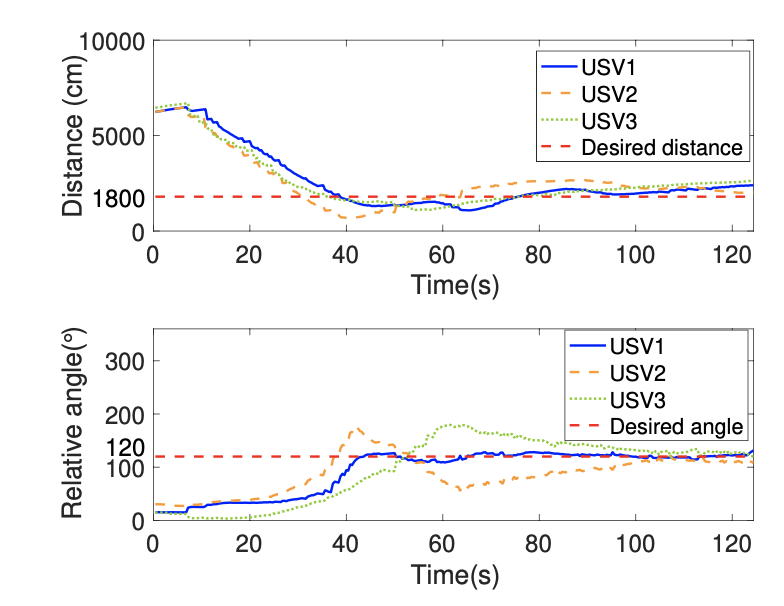
Abstract——In this brief, a distributed surrounding control problem is investigated for multiple unmanned surface vessels~(USVs) with varying interconnection topologies. A distributed estimation-and-control hierarchical framework is developed, where an individual estimator is designed for a USV to predict the state of the target in an interconnection network with jointly dwellingly connected topologies. Thereby, the vessels could be governed to encircle the target in a convex hull, which evenly rotate around the target at the center. Moreover, asymptotical stability conditions are derived to guarantee the feasibility of the proposed surrounding controller. Finally, experiments are conducted for a real multi-USV system consisting of three 1.6 meters-long vessels and a differential GPS station, to verify the effectiveness of the proposed controller.