热烈祝贺胡斌斌博士论文“Bearing-only Motional Target-Surrounding Control for Multiple Unmanned Surface Vessels”被国际工业电子顶刊IEEE Transactions on Industrial Electronics录用为长文
《Bearing-only Motional Target-Surrounding Control for Multiple Unmanned Surface Vessels》
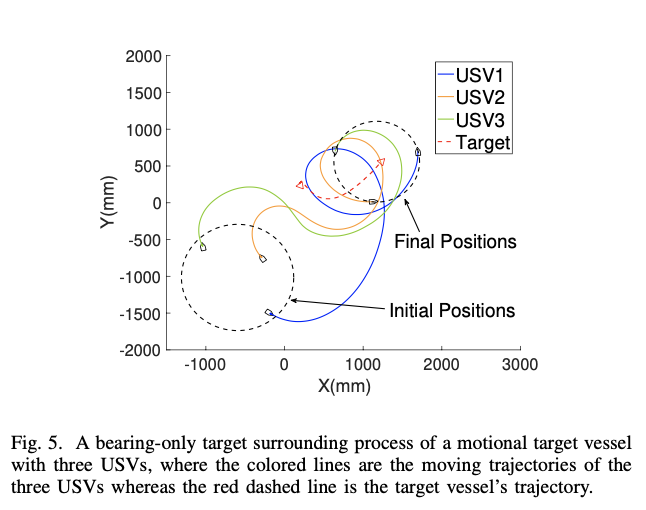
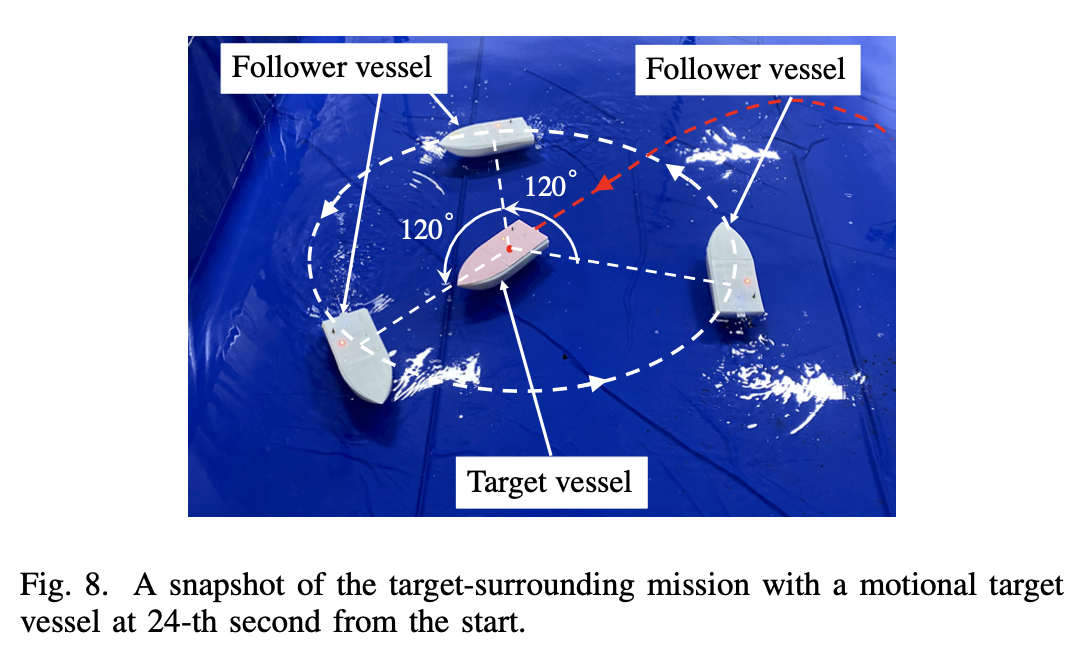
Abstract:This paper proposes a distributed bearing-only con- troller for multiple unmanned surface vessels (USVs) to encircle and rotate evenly around a motional target with inter-USV topologies. The distributed control law consists of three terms, i.e., a bearing-only estimation term to approximate the target state, an upper level surrounding term to fulfill the target-surrounding mission, and single vessel regulation term to track the upper level signal. Significantly, technical conditions are derived to guarantee the asymptotical stability of the closed-loop system. Finally, experimental results on a real platform composed of three HUSTER-0.3 USVs and a target vessel are conducted to substantiate the effectiveness of the proposed controller.