Abstract-This paper proposes a flexible formation tracking control protocol (FFTC) for multiple unmanned surface vessels (USVs) to pass through narrow water channels with unknown curvatures. An observer is developed to estimate the curvatures of channels. A flexible formation tracking control protocol is thereby designed to steer USV fleets to pass through narrow channels in a flexible serial formation. Furthermore, the asymptotically stable conditions of the closed-loop multi-USV systems is theoretically
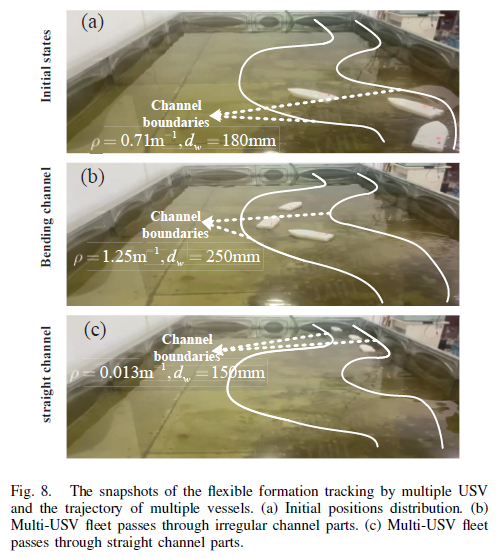
derived. Finally, numerical example and experimental results with a fleet of three HUSTER-0.3 USVs are reported to substantiate the effectiveness of the proposed FFTC protocol for navigating through narrow channel in a laboratory context.