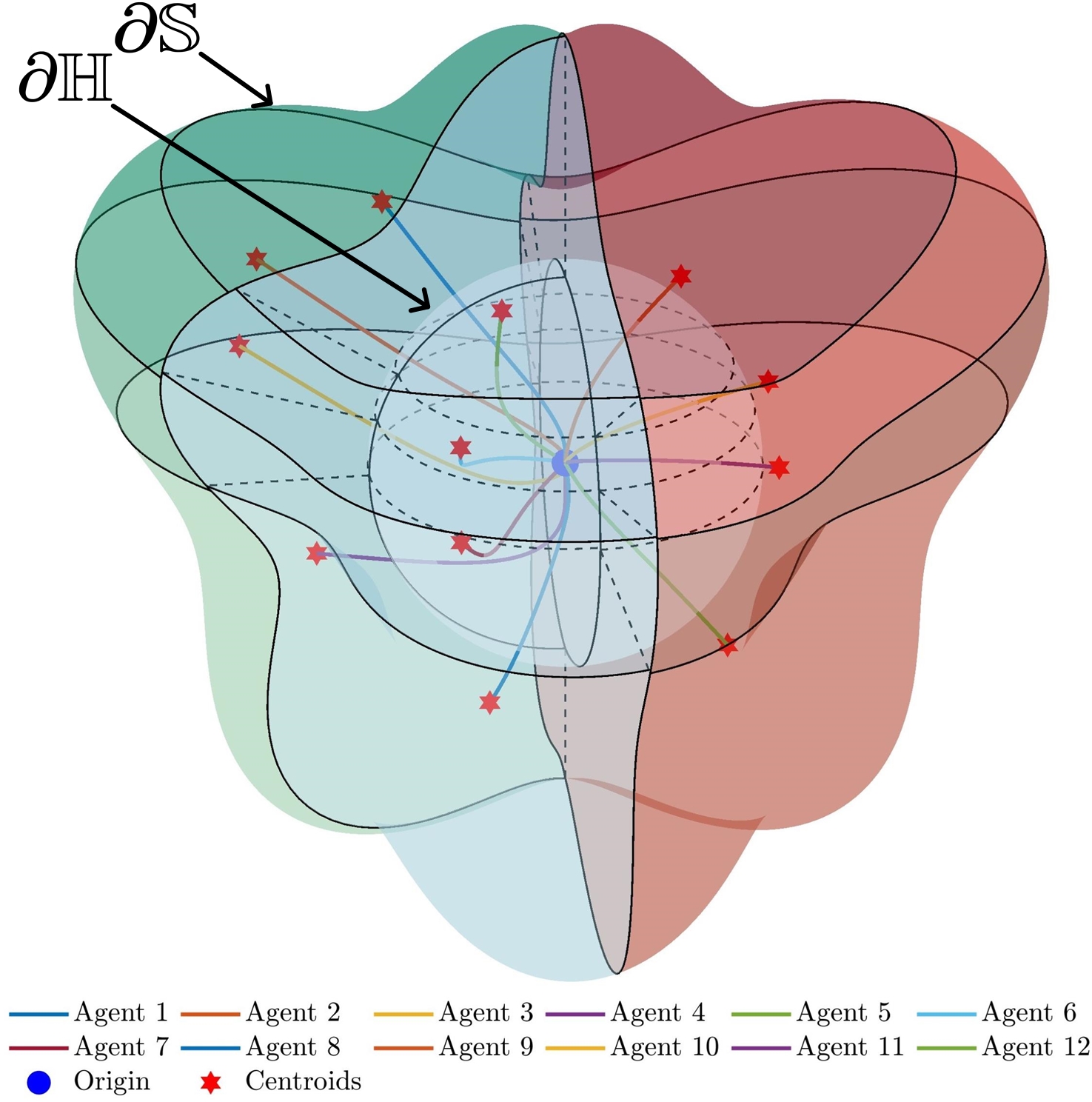
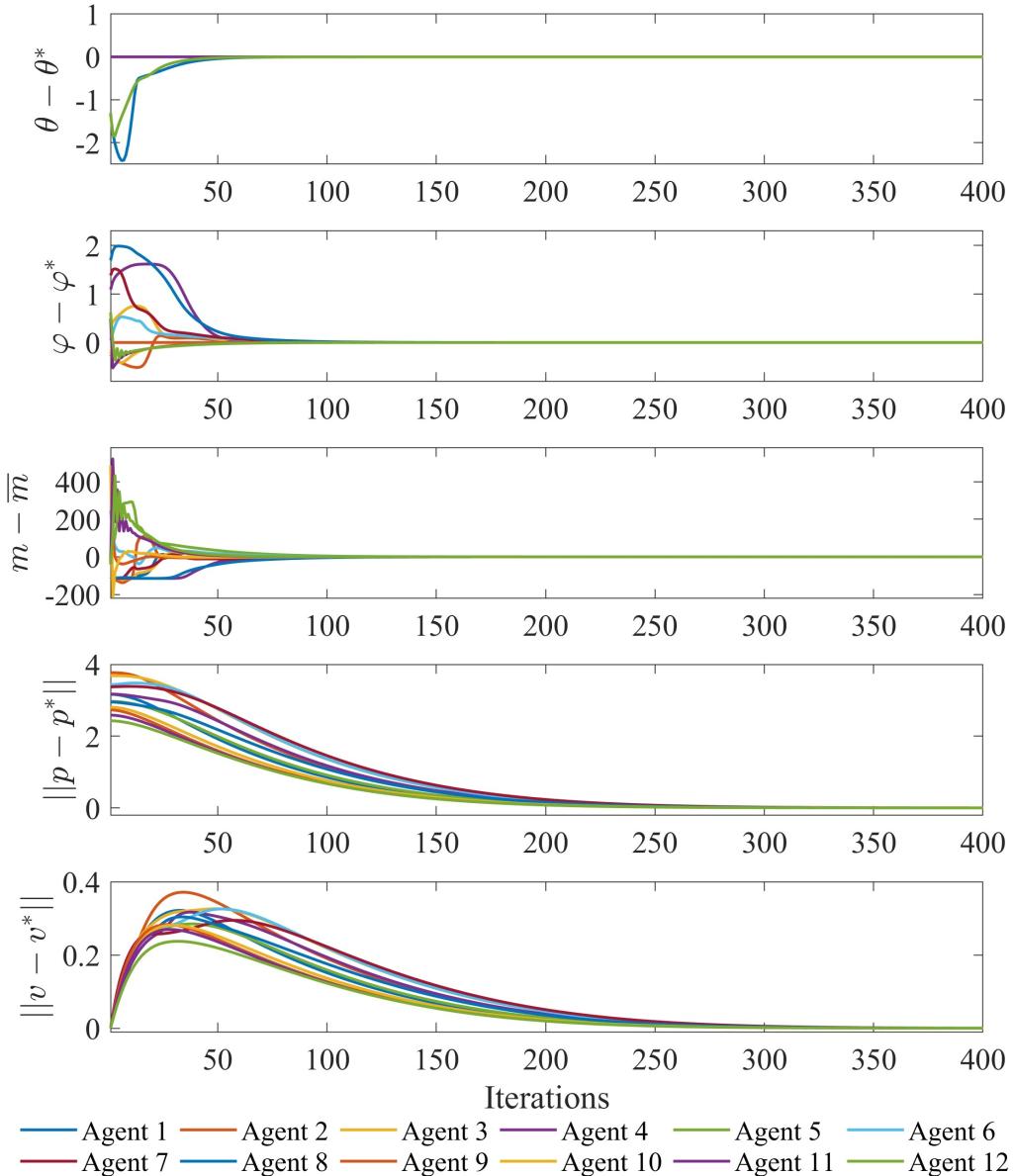
Abstract:The optimal configuration of multi-agent systems (MASs) has long been a challenging task to fulfill abundant three-dimensional (3D) non-convex coverage operations.This brief proposes a spheroidal coverage control scheme, where a spheroidal partition protocol is designed with a distributed estimator to ensure an equitable workload in each sub-region.Afterwards, a distributed control law is developed to asymptotically deploy each agent to the associated optimal configuration.Significantly, the analytical challenge of the present design lies in the convergence analysis of the three-level cascading systems induced by the proposed spheroidal partition protocol.Finally, numerical simulation is conducted to verify the effectiveness of the present spheroidal coverage control method.