[CAA News] "Key Technologies and Core Equipment of Autonomous Unmanned Vehicle Cluster Cooperation for Operation in Complex Waters" passed the appraisal of scientific and technological achievements.
On July 23, led bythe Industrial Technology Research Institute of Huazhong University of Science and Technology in Guangdong (hereinafter referred to as the "Institute of Industrial Research"),Huazhong university of science and technology,South China Sea Institute of Chinese Academy of Sciences,Guangzhou Shipyard International,China Ship Research and Design Center,China Institute of Integrated Technology and Economy of Shipbuilding Industry,City University of Hong Kong and other unitsto complete the"Key Technologies and Core Equipment of Autonomous Unmanned Vehicle Cluster Cooperation for Complex Waters Operation"by the Chinese institute of automation of scientific and technological achievements appraisal.

This appraisal meeting was organized and hosted by Chinese Association of Automation, and was held in the form of online video + offline meeting. Xinping Yan, academician of the Chinese Academy of Engineering and director of the National Engineering Research Center for Water Transportation Safety, is the chairman of the accreditation committee, and Jinping Qu, academician of the Chinese Academy of Engineering, director of The new polymer molding equipment National Engineering Research Center, is the vice-chairman of the committee. Assessments members including Professor Chenghong Wang, Vice President of the Chinese Association of Automation,Professor Chen Xuemei from Guangzhou Institute of Mechanical Science, Professor Chen Xin from Guangdong University of Technology, Professor Cheng Daobo from Guangdong Intelligent Manufacturing Research Institute, Professor Lou Yunjiang from Harbin Institute of Technology (Shenzhen), Professor Liu Ning from Jinan University, Professor Chenghui from Sun Yat-sen University and other authoritative experts in related fields.

Yingfu Zhu, the chief designer of the aircraft carrier "Liaoning", Yao Zhang, the secretary of the Party Committee of the School of Automation of Huazhong University of Science and Technology, Professor Zeng Zhigang, the dean of the school, and Professor Wang Jun, leader of the unmanned vehicle team attended the appraisal meeting via video online.

Jun Yang, deputy director of Guangdong Provincial Department of Science and Technology, Tianliang Huang, deputy director of Dongguan Science and Technology Bureau and other provincial and municipal leaders,as well as relevant responsible persons of the project completion unit and representatives of core R&D personnel attended the meeting. The meeting was chaired by Zhang Nan,secretary general of the Chinese Association of Automation.


△Guojun Zhang, President of Industrial Technology Research Institute of Huazhong University of Science and Technology in Guangdong, delivered a welcome speech.

The appraisal committee heard the "Project Technical Research Report and Work Summary Report", "Science and Technology Novelty Search Report" and other reports made by the leading accomplishing unit, carefully reviewed the documents and materials submitted for appraisal,investigated the cluster experiment site of Dongguan Songshan Lake Autonomous Vehicle Base,after the inquiry of the results, answerers and discussions, the appraisal committee agreed that the basic theoretical research on collaborative control of autonomous unmanned vehicle clusters was at the international advanced level, and the formation phase change control technology of autonomous unmanned vehicle clusters was at the international leading level,and agree to pass the appraisal of scientific and technological achievements.

△Experts visit the project site

△Experts visit Dongguan Songshan Lake Autonomous Vehicle Base
Aiming at the dynamic operation requirements of complex water environment, the project pioneered the theory and method of phase transformation regulation of unmanned vehicle swarm formation,established the two-layer networked cooperative control framework of unmanned vehicle cluster, inventedthe core components such as collaborative phase transformation control of heterogeneous unmanned vehicle cluster formation, realized the dynamic task-driven evolution control of the cluster formation.A method combining high precision control and instability recovery strategy of the unmanned vehicle is proposed, and a vector water jet propeller and all-electric propulsion control system are developed and realized high precision and stable speed, course, track and positioning control of the unmanned vehicle. A multi-boat and multi-source sensor fusion sensing detection and target recognition and tracking system was invented, which realized accurate target recognition in complex water environment.The project developed a complete set of heterogeneous cluster equipment consisting of 3 types of 10 unmanned vehicle.
The project applied for 46 invention patents, 24 authorized invention patents and 11 software Copyrights;Developed 4 new products, led the development of 3 national standards, 4 enterprise standards;He has published 45 SCI papers, including 42papers in the first section of JCR.
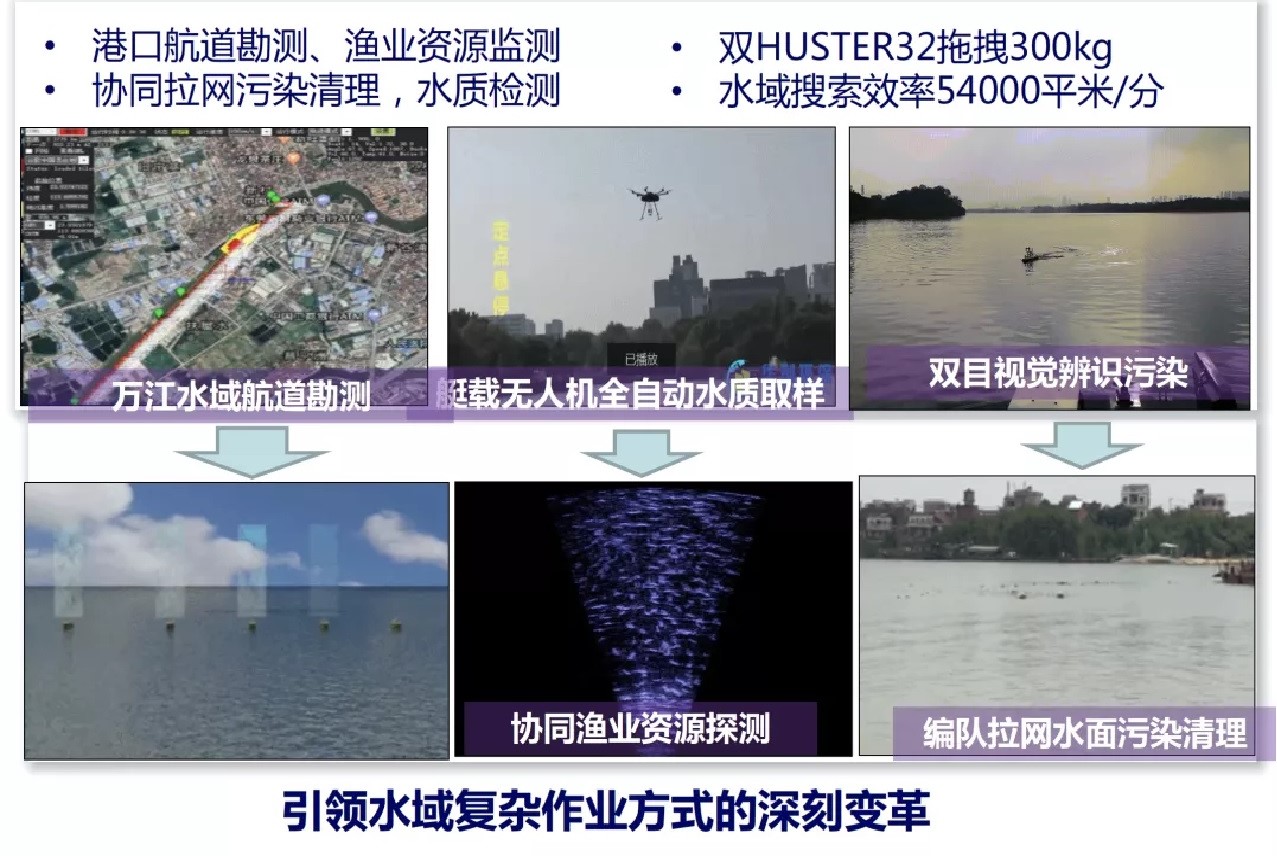
The results have been applied to the detection of major Marine facilities such as the Shenzhen-Middle Passage Cross-sea Immersed Tube Tunnel, the detection of some ports and waterways in the Pearl River Estuary, the water quality detection and water surface pollution cleanup in the Dongjiang and Wanjiang rivers, and the detection of fishery resources. It has been successfully applied to well-known enterprises, colleges and research institutes in China, and has become the core configuration and important task load. It has played an important role in the construction of complex waters and achieved significant economic and social benefits.

Source: Institute of Industrial Technology, Huazhong University of Science and Technology, Guangdong
Chinese Association of Automation 2020.7.28